TECHNICAL WHITE PAPER // ZCNEST
In advanced warehouse automation, single-vendor lock-in is giving way to mixed fleets where forklift AGVs, AMRs, and manual handling units share the same operational footprint. This shift transitions the core engineering challenge from standalone machine navigation to centralized fleet traffic orchestration. The operational goal is eliminating deadlocks at intersections while preserving the distinct kinetic capabilities of different robot brands.
01
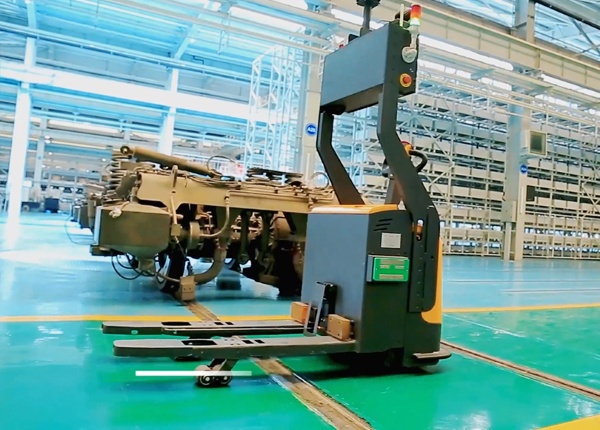
A mixed fleet orchestrator must manage highly disparate physical realities in real time. Forklift AGVs require wide turning radii and long braking buffers, whereas fast-moving AMRs operate with compact footprints and tight stopping zones.
[ DATA ROUTING TOPOLOGY ]
WMS / ERP Enterprise Layer
└── [ API / WebSockets ] ──> ZCNest RCS (Central Coordinator)
├── VDA 5050 Protocol Core ──> Third-Party AMRs / Tuggers
└── Native Industrial Drivers ──> ZCNest Forklift AGVs (Wireless Charging)
02
While many suppliers advertise VDA 5050 compatibility to secure bids, actual deployment maturity varies significantly. Implementations frequently fall into three distinct capability tiers:
Tier A: Standard Task Exchange Only The host system sends basic order actions and receives vehicle coordinates, but complex traffic management and safety configurations remain locked within proprietary, individual vendor systems.
Tier B: Dynamic Path Reservation Vehicles map out their intended paths through the RCS before passing through physical nodes. This lets the system alter routes in real time based on layout congestion, preventing physical blockages.
Tier C: Full Telemetry Synchronization Deep, two-way integration sharing active safety field states, sensor statuses, battery profiles, and manual override conditions. This tier delivers unified multi-brand operations from a single control desk.
03
When multi-vendor robots intersect, preventing system deadlocks requires strict algorithmic control rather than relying on standard on-board sensor stops. The central system avoids conflict using four operational mechanisms:
• Spatial Zone Gating The RCS treats intersections as exclusive zones. A robot cannot enter a zone until the system clears and locks it for that vehicle's exact path footprint.
• Kinetic Priority Ranking Right-of-way rules are dynamically assigned based on vehicle payloads, stopping distances, and the urgency of the associated WMS task.
• Real-Time Deviation Rerouting If a manual forklift or human worker blocks a main corridor, the RCS re-maps paths for all active automated units within milliseconds to maintain facility throughput.
Integrating third-party automated equipment into an existing Robot Control System (RCS) introduces long-term financial factors that extend beyond the initial software setup fees. Buyers must closely audit downstream firmware updates. If an external vendor changes their proprietary API structures or modifies their vehicle's underlying navigation controller, the communication bridge often breaks. This leads to unexpected maintenance expenses and troubleshooting finger-pointing between vendors during an outage.
Evaluating modern automated guided vehicles requires assessing their software's interoperability and traffic orchestration capabilities over machine design or appearance. Long-term warehouse efficiency relies entirely on deploying an open architecture platform built on standard communication protocols. This strategy keeps your automation path flexible and scalable, avoiding vendor lock-in as your facility needs evolve over time.
📖 AGV Forklift Guide — Essential manual for selection and safety.
⚙️ How AGV Systems Work — A deep dive into navigation and logic.
⚖️ AGV vs. AMR Comparison — Choosing the right technology for your facility.
💰 AGV Cost and ROI — Evaluating investment and payback periods.














 Chinese
Chinese English
English